November 7, 2023
Bilevel Planning for Robots: An Illustrated Introduction
Authors’ note: Our recent work [1, 2, 3, 4, 5, 17] has considered learning models for a form of task and motion planning (TAMP) that we call bilevel planning. Our papers often assume familiarity with bilevel planning and focus on learning. In this blog post, we instead describe bilevel planning from first principles and don’t […]

September 5, 2023
Embodied lifelong learning for decision making: Opportunities brought on by modularity
Embodied intelligence is the ultimate lifelong learning problem. If you had a robot in your home, you would likely ask it to do all sorts of varied chores, like setting the table for dinner, preparing lunch, and doing a load of laundry. The things you would ask it to do might also change over time, […]
July 3, 2023
What’s Your Problem? An Oft-Missing Section in AI Papers
Include a Problem Setting section in your next AI paper. It’s worth the word count! And it should be standard in our field. What’s in a Problem Setting? Many AI papers propose a new method that is meant to perform well for a certain class of problems. This post focuses on papers of this kind, […]
March 15, 2021
Part 2: Learning to Generate Abstractions in Problems with Relational Structure
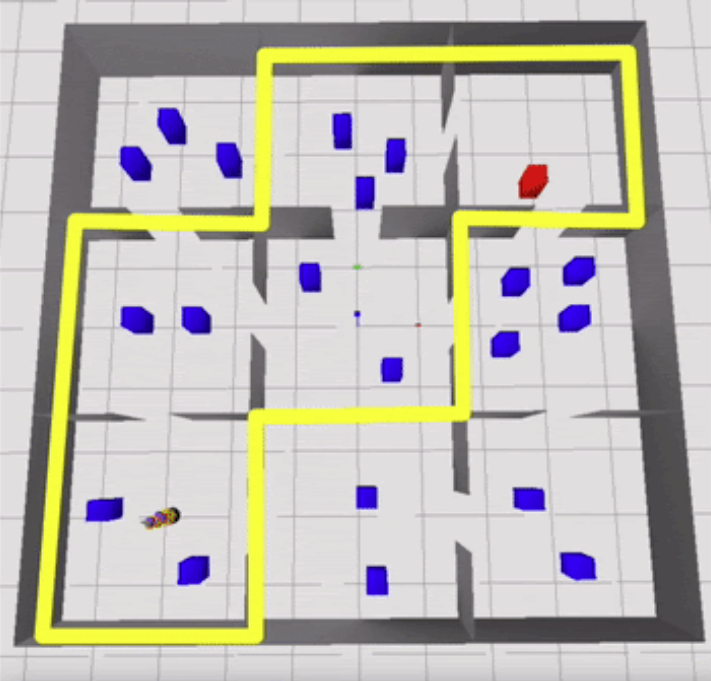
This post discusses our work “Planning with Learned Object Importance in Large Problem Instances using Graph Neural Networks,” published at AAAI 2021.
March 15, 2021
Part 1: Learning to Generate Context-Specific Abstractions for Factored MDPs
This post discusses our work “CAMPs: Learning Context-Specific Abstractions for Efficient Planning in Factored MDPs,” published at CoRL 2020.
March 15, 2021
Learning to Generate Abstractions for Faster Planning
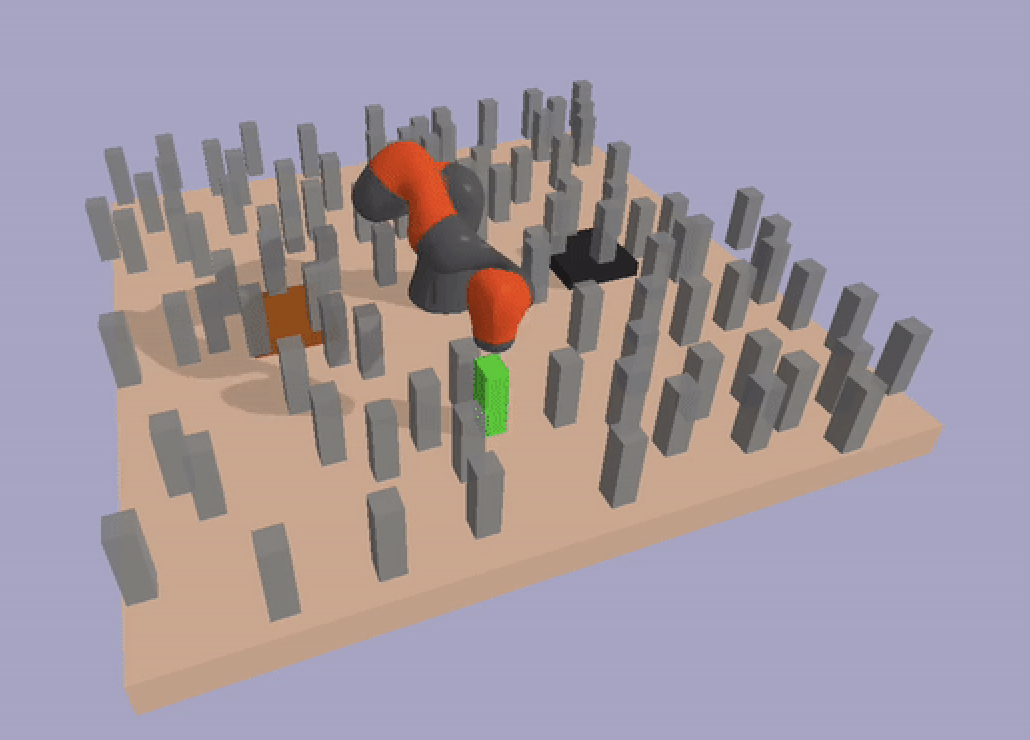
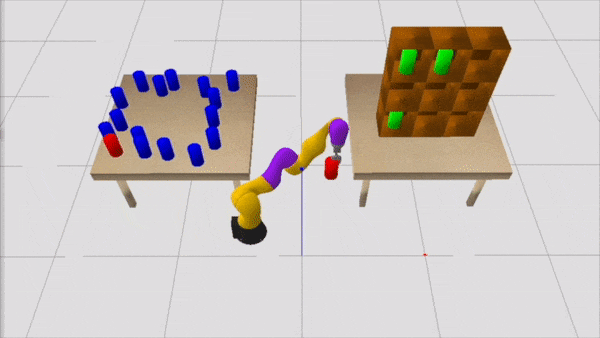
In our recent work, we consider strategies for effective and efficient decision-making that lie between the two extremes of pure learning and pure planning. Our main idea is to learn to generate abstractions of problems that afford faster planning.
January 15, 2021
The engineering science of embodied intelligence
Natural science and engineering science Cognitive science and neuroscience study the processes by which humans and other animals generate behavior that is intelligent: robust, flexible, and effective at achieving and maintaining the welfare of the individual. Artificial intelligence studies the processes by which computers can generate behavior that is intelligent: robust, flexible, and effective at […]